dfki-robot/test/ugv_2019-08-15-05-24-58
Download original bagDownload processed bag




| Start | August 15 2019, 05:24 |
| End | August 15 2019, 06:29 |
| Duration | 64 mins, 54 secs |
| Messages | 3881419 |
| Size | 21 GiB |
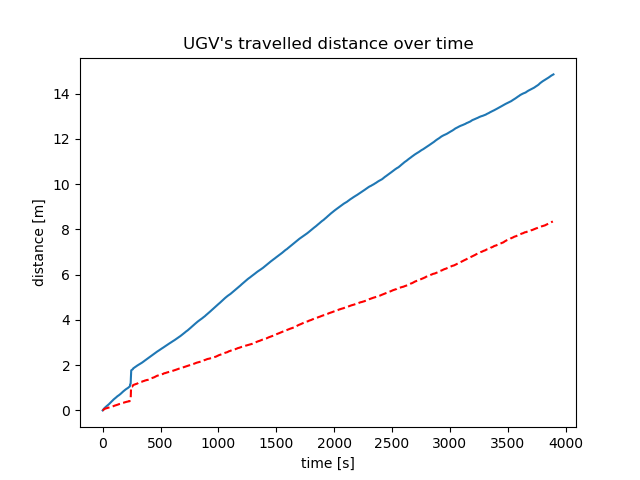
| Distance | 14.8 m |
| Start of moving | 00:03:55 |
| End of moving | 00:04:06 |
| Average speed | 1.436 m/s |
| Point cloud map | Not yet evaluated |
| Controller | robot gamepad, gamepad in PC, autonomous |
| Movement tag | general movement |
| Moving joints | laser |
Topics
| Topic name | Type | Messages | Average time delay [s] | Max. time delay [s] |
|---|---|---|---|---|
| /adapt_trav_vel | geometry_msgs/TwistStamped | 38955 | 0.001 | 1.582 |
| /adapt_trav_vel_in | geometry_msgs/TwistStamped | 38954 | 0.002 | 1.486 |
| /artifact_detections | darpa_msgs/Detections | 8049 | 3.252 | 7.825 |
| /artifact_detections3D | darpa_msgs/DetectionPositions | 8049 | 3.26 | 7.843 |
| /battery_status | sensor_msgs/BatteryState | 50228 | 0.001 | 1.524 |
| /cmd_vel | geometry_msgs/Twist | 38985 | ||
| /currents | nifti_robot_driver_msgs/CurrentsStamped | 50227 | 0.001 | 1.408 |
| /detection_localization/confirmed_hypotheses | darpa_msgs/LocalizationHypotheses | 263 | 0.002 | 0.016 |
| /detection_localization/hypotheses | darpa_msgs/LocalizationHypotheses | 3896 | 0.003 | 0.97 |
| /diagnostics | diagnostic_msgs/DiagnosticArray | 410112 | 0.001 | 0.947 |
| /diagnostics_agg | diagnostic_msgs/DiagnosticArray | 3895 | 0.0 | 0.706 |
| /dynamic_point_cloud | sensor_msgs/PointCloud2 | 1264 | 3.013 | 3.144 |
| /emergency_stop | std_msgs/Bool | 1 | ||
| /exploration/goals | sensor_msgs/PointCloud2 | 561 | 1.715 | 29.333 |
| /exploration/path | nav_msgs/Path | 15483 | ||
| /filtered_joint_states | sensor_msgs/JointState | 50225 | 0.001 | 1.242 |
| /flippers_state | nifti_robot_driver_msgs/FlippersStateStamped | 50225 | 0.001 | 1.242 |
| /gpio_status | tradr_ft232h_gpio_driver_msgs/GpioStatus | 3500 | 0.113 | 1.223 |
| /icp_odom | nav_msgs/Odometry | 1264 | 3.396 | 24.594 |
| /imu/data | sensor_msgs/Imu | 371602 | 0.001 | 1.042 |
| /imu_odom | nav_msgs/Odometry | 371586 | 0.053 | 1.205 |
| /joint_states | sensor_msgs/JointState | 50223 | 0.001 | 1.091 |
| /local_joy/cmd_vel | geometry_msgs/Twist | 1182 | ||
| /local_joy/joy | sensor_msgs/Joy | 18263 | 0.002 | 1.124 |
| /mux_cmd_vel/selected | std_msgs/String | 41 | ||
| /mux_flipper_cmd/selected | std_msgs/String | 1 | ||
| /mux_flippers_cmd/selected | std_msgs/String | 1 | ||
| /mux_flippers_cmd_vel/selected | std_msgs/String | 1 | ||
| /mux_laser_center/selected | std_msgs/String | 21 | ||
| /mux_posture_cmd/selected | std_msgs/String | 1 | ||
| /mux_posture_cmd_stamped/selected | std_msgs/String | 1 | ||
| /mux_scanning_speed_cmd/selected | std_msgs/String | 20 | ||
| /mux_tracks_vel_cmd/selected | std_msgs/String | 40 | ||
| /nav/cmd_vel | geometry_msgs/Twist | 38951 | ||
| /network/receiver_stats | nimbro_topic_transport/ReceiverStats | 1948 | 0.0 | 0.256 |
| /network/sender_stats | nimbro_topic_transport/SenderStats | 3871 | 0.0 | 0.008 |
| /posture | std_msgs/Int32 | 50218 | ||
| /robot_status | nifti_robot_driver_msgs/RobotStatusStamped | 50217 | 0.0 | 0.608 |
| /rosout | rosgraph_msgs/Log | 162157 | 1.759 | |
| /rosout_agg | rosgraph_msgs/Log | 162104 | 0.004 | 3.246 |
| /scan | sensor_msgs/LaserScan | 193515 | 0.038 | 0.313 |
| /scanning_speed_cmd | std_msgs/Float64 | 1 | ||
| /subt_odom | nav_msgs/Odometry | 3888 | 0.065 | 0.436 |
| /teleop_joy/cmd_vel | geometry_msgs/Twist | 46 | ||
| /temperature | sensor_msgs/Temperature | 371530 | 0.001 | 0.289 |
| /tf | tf2_msgs/TFMessage | 1168971 | ||
| /tf_static | tf2_msgs/TFMessage | 61 | ||
| /tracks_vel | nifti_robot_driver_msgs/TracksStamped | 50213 | 0.0 | 0.212 |
| /viz/omnicam/camera_info | sensor_msgs/CameraInfo | 18340 | 0.231 | 1.05 |
| /viz/omnicam/image/compressed | sensor_msgs/CompressedImage | 18267 | 0.387 | 1.666 |
| /viz/omnicam/image/compressed/parameter_descriptions | dynamic_reconfigure/ConfigDescription | 1 | ||
| /viz/omnicam/image/compressed/parameter_updates | dynamic_reconfigure/Config | 1 |
Video
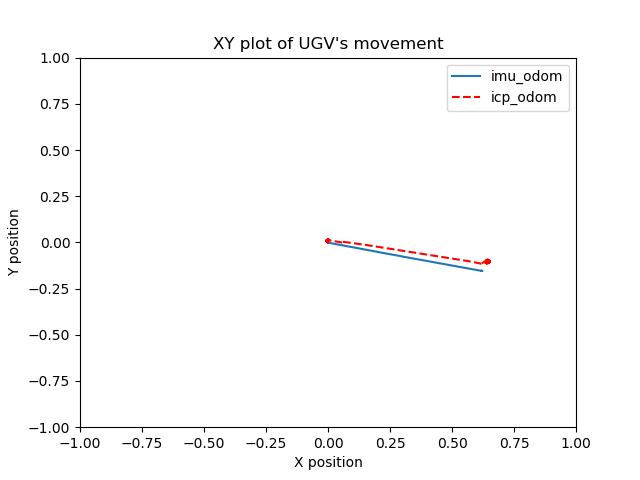
XY graph
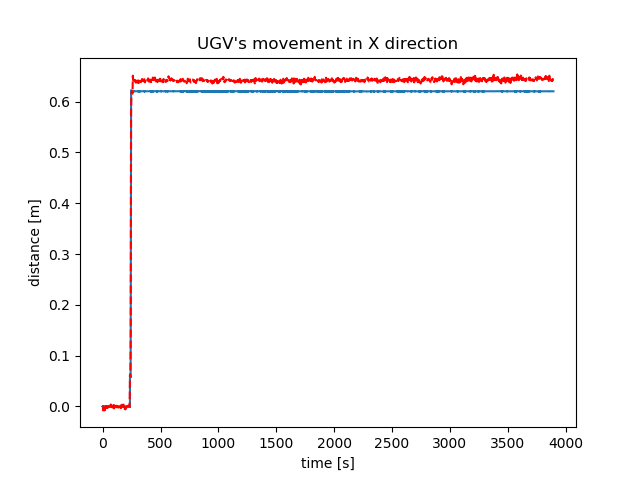
Graph of X direction over time
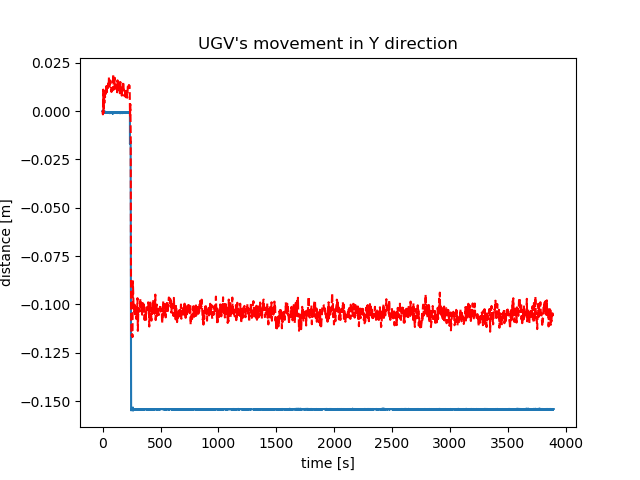
Graph of Y direction over time
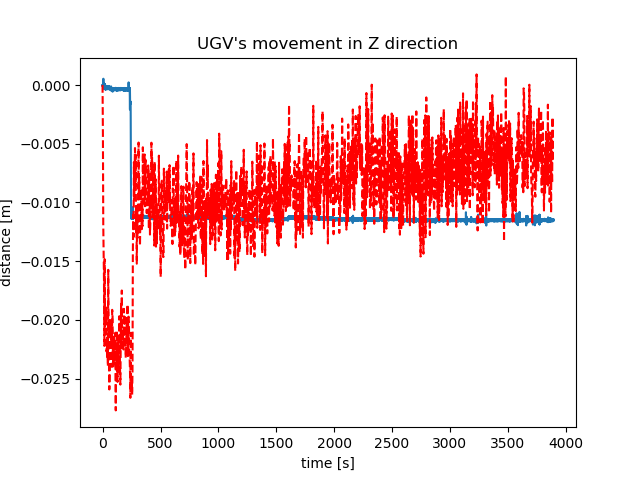
Graph of Z direction over time
Travelled distance over time
Parts_config dictionary from .params YAML file
parts_config: axis_x_offset: 0.059 axis_y_offset: 0.08 big_collision_box_height: 0.5 big_collision_box_on_top: True big_collision_box_width: 0.5 big_collision_box_x: -0.1 flipper_inflation_ratio: 2.0 flipper_inward_enlargement: 0.037 has_axis_camera: False has_flipper_touch_sensors: False has_jetson: True has_mobilicom: True has_new_realsense: True has_omnicam: True has_ptuxthermo: False has_realsense: False has_top_box: True has_velodyne: False jetson_shift_x: 0.515 jetson_shift_y: 0.12 jetson_yaw: 0.0 mobilicom_antenna_l_rotation: -0.3 mobilicom_antenna_l_tilt: 0 mobilicom_antenna_r_rotation: 0.8 mobilicom_antenna_r_tilt: 0 mobilicom_antennas_length: 0.17 mobilicom_has_antenna_box: True mobilicom_parent_link: omnicam mobilicom_roll: 0.0 mobilicom_shift_x: -0.02 mobilicom_shift_y: 0.0 mobilicom_shift_z: 0.08 mobilicom_yaw: -0.91 ptuxthermo_x_offset: 0.2 ptuxthermo_y_offset: 0.18 realsense_holder_version: 4 realsense_parent_link: omnicam realsense_roll: -0.00101 realsense_shift_x: 0.025 realsense_shift_y: 0.038 realsense_shift_z: 0.077 realsense_tilt: 0.504467 realsense_upside_down: False realsense_yaw: -0.01133 top_box_j_x: 0.468 velodyne_x_offset: 0.41 velodyne_yaw: -1.84